CHAPTER 8
THE DISCRETE FOURIER TRANSFORM ( DFT )
Analisa fourier adalah salah satu bagian dari teknik matematika, yang semuanya berdasarkan pada dekomposisi sinyal sinusoidal.
1. The family of fourier transform
Transformasi fourier dalam DSP digunakan untuk melakukan sintesis sinyal dan dekomposisi sinyal. Pada proses dekomposisi, transformasi fourier digunakan untuk mempermudah pengolahan sinyal karena sinyal dapat direpresentasikan dengan satu titik dalam satu waktu, sehingga akan mempermudah perhitungan dalam bentuk biner.
Berikut adalah gambaran proses dekomposisi untuk sinyal input dengan 16 titik.
16 titik sinyal input
hasil dekomposisi untuk gelombang kosinus
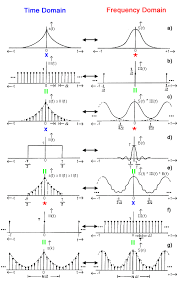
Pada dasarnya transformasi fourier dapat digolongkan menjadi 4 jenis menurut tipe sinyalnya.
a) Fourier Transform
sinyal yang digunakan merupakan sinyal kontinu (sinyal yang kedua positif negatifnya tak berhingga) dan tidak mempunyai perulangan secara periodik (Aperiodic-continuous)
b) Fourier Series
Pada fourier series, sinyal yang digunakan hampir sama dengan yang digunakan pada fourier transform, bedanya pada fourier siries sinyalnya kontinu dan memiliki periode tertentu (Periodic-continuous)
c) Discrete Time Fourier Transform
sinyal yang digunakan merupakan sinyal yang direpresentasikan dalam sebuah titik diskrit / suatu titik yang mempunyai nilai yang jelas terhadap waktu, tetapi sinyalnya tidak bersifat periodik (Aperiodic-Discrete)
d) Discrete Fourier transform
sinyalnya merupakan sinyal diskrit yang mengalami perulangan dalam periode tertentu ( Periodic-Discrete)
Berikut ini adalah contoh sinyal dari masing-masing tipe transformasi.
Masing-masing tipe dari keempat jenis transformasi fourier diatas dapat dibagi lagi menjadi Real DSP dan Complex DSP. Real DFT merupakan transformasi yang paling sederhana dengan menggunakan angka-angka koordinat dan aljabar dalam proses sintesis serta dekomposisinya. Sedangkan untuk complex DFT menggunakan bilangan komplex, sebagai contoh 3+4j, dimana j=√1.
2. Notation and format of the Real DFT
Pada gambar diatas, DFT mengubah N point sinyal input kedalam dua bagian sinyal output dengan masing-masing N/2+1 point. Sinyal input berdasarkan domain waktu, karena sebagian besar sinyal yang digunakan DFT diambil berdasarkan interval waktu tertentu. Sedangkan sinyal outputnya berdasarkan domain frekuensi karena outputnya menggambarkan amplitudo. Apabila diberikan sinyal dengan domain waktu, maka untuk menghitung sinyal dengan domain frekuensi disebut dekomposisi atau forward DFT. Sedangkan untuk proses sebaliknya disebut sintesis atau invers DFT.
3. The frequency domain's independent variable
Gambar diatas merupakan contoh DFT dengan N=128. Sinyal dengan domain waktu terdiri atas array x[0] sampai x[127]. Sedangkan sinyal dengan domain frekuensi terdiri dari dua array ReX[0] sampai ReX[64] dan ImX[0] sampai ImX[0] sampai ImX[64].
Pada sinyal dengan domain frekuensi, sumbu horisontal dapat dituliskan dalam 4 cara, diantaranya adalah
a) Dengan menuliskan index 0 – N/2
b) Dengan menuliskan bagian dari frekuensi sampling dari 0 – 0,5
c) Sama dengan cara kedua, tetapi sumbu horisontalnya merupakan perkalian dari 2ℼ
d) Dengan menuliskan ketentuan dalam frekuensi analog pada aplikasi tertentu
DFT Basis Function
Gelombang sinus dan kosinus digunakan pada DFT umumnya disebut “fungsi basis DFT”. Output DFT adalah kumpulan angka yang merupakan representasi dari amplitude. Fungsi basis DFT adalah kumpulanan angka gelombang sin dan kosinus dengan kesatuan amplitudo. Fungsi basis DFT degenerate dari fungsi;
Ck [i] = cos
Sk [i] = sin
Ck[] adalah gelombang cos dari amplitude yang terbentuk di ReX[k], dan Sk[] adalah delombang sin dari amplitude yang terbentuk di ImX[k]. Pada contoh gambar di bawah, N = panjang sinyal input = 32; k = nilai frekuensi setiap sinusoidal. Aktanya c1[] adalah gelombang cosinus yang membenuk satu siklus penuh di N point.
Pada gambar (a) menunjukkan gelombang cosinus c0[] pada frekuensi nol, dengan nilai konstan 1. Artinya, ReX[0] memegang nilai rata-rata semua poin pada sinyal domain waktu, atau nama lain pada elektronik, ReX[0] adalah DC offset. Pada gambar (c) dan (d) menunjukkan c2[] & s2[], sinusoidal terdapat 2 siklus complete pada N point. C10[] dan s10[], sinusoidal terdapat 10 siklus complete pada N point. Pada 10 siklus tidak telihat jelas geombang sinus dan cosinus, ini merupakan salah satu permasalahannya.
Frekuensi tertinggi pada fungsi basis gambar (g) dan (h), c16[] & s16[]. Pada diskrit gelombang cosinus nilaianya terdapt antara -1 dan1 yan gbisa ditafsirkan sebagai samplilng sebuah sinusoidal continous di puncak. Berbeda dengan diskrot gelombang sinus yang menghasilkan semuanya nol,yang disebut dengan zero crossing. Ini membuat nilai ImX[N/2] sama dengan ImX[0], karena selalu sama di nol dan bukan memakai sintesis sinyal domain waktu.
Sythesis, Calculating the inverse DFT
Synthesis equation
Beberapa sinyal nilai N, x[i] dapat ditulis dengan menambahkan N/2 + 1 gelombang cosinus dan n/2 + 1 gelombang sinus. Amplitude dari gelombang cosinus dan sinus berlaku dalama array ImX[k] dan ReX[k]. Synthesis equation mengalikan amplitude tersebut dengan fungsi basis untuk menuliskan kumpulan skala gelombang cosinus dan sinus. Menambahkan skala tersebut menghasilkan sinyal domain waktu.
Array disebut dengan Im [k] dan Re [k], daripada ImX[k], dan ReX[k]. Ini karena amplitude dibutuhkan untuk synthesis, yang rendah berbeda dari frekuensi domain sebuah sinyal (ImX[k], dan ReX[k]). Di bawah ini adalah bentuk konversi di antara keduanya.
Menganggap dimana kamu diberika representation frekuensi domain dan ditanya untuk synthesize yang berhubungan dengan sinyal domain waktu. Untuk memulainya, kamu harus menentukan amplitudo dari gelombang sinus dan cosinus. Dengan kata lain, diberikan ImX[k] dan ReX[k], kamu harus menemukan Im [k] dan Re [k]. Pada gambar diatas adalah bentuk persamaan matematikanya. Untuk melakukan ini pada program computer, cara pertama bai semua nilai di frekuensi domain dengan N/2. Kedua, ganti bentuk dari semua nilai dari imaginary. Ketiga, bagi sampel pertama dan terakhir di bagian nyata ReX[0] dan ReX[N/2] dengan dua. Ini menyediakan amplitudo dibutuhkan untuk synthesize yang digambarkan oleh Eq 8-2. Eqs 8-2 dan 8-3 didefinisikan inverse DFT.
Seluruh inverse DFT ditunjukkan pada daftar program computer di atas. Tampak dua cara synthesize dapat diprogram dan keduanya ditunjukkan. Cara pertama, masing-masing skala sinusoida digenerate setiap satu waktu dan diambahkan ke dalam kumpulan array, yang menjadikan sinyal domain waktu. Cara kedua, setiap sampel di sinyal domain waktu dihitung sekali setiap waktu sebagai penjumlahan semua yang menghubungkan sampel gelombang sinus dan cosinus. Keduanya menghasilkan hasil yang sama. Perbedaannya sangat kecil, perulangan kedalam dan ke luar ditukarkan selama synthesis.
Analysis, Calculating the DFT
DFT dapat dihitung dengan tiga cara yang berbeda. Pertama, dengan pendekatan dari simultaneous equation. Dalam latihannya tak begitu efisien. Kedua correlation, ini merupakan dasar dalam mendeteksi bentuk gelombang yang diketahui di berbagai sinyal. Ketiga, Fast Fourier Transform (FFT), merupakan algoritma yang handal karena memasukkan sebuah DFT dengan nilai N dari tiap DFT dengan sebuah nilai sendiri.
1) DFT by Simultaneous Equations
Terdapat nilai N dari domain waktu, dan bagaimana menghitung nilai N dari domain frekuensi. Ini basis dari aljabar. Caranya untuk memecahkan N yang tidak diketahui, kamu harus bisa menuliskan N linearly independent equations. Untuk melakukannya, ambil sampel pertama dari setiap sinusoidal dan tambahkan segera. Jumlah harus sama dengan sampel pertama dalam sinyal domain waktu, sehingga menyediakan persamaan pertama. Solusi ini bisa diselesaikan dengan cara Gaussian Elimination.
2) DFT by correlation
Ini merupakan cara standard penghitungan DFT. Intinya akan menghitung sebuah sampel tunggal dengan mendeteksi bentuk gelombang yang diketahui berisi beberapa sinyal, mengalikan dua sinyal dan menambahkn semua nilai pada hasil akhir sinyal. Formulasi matematikanya:
Dengan kata lain, setiap sampel pada domain frekuensi didapati dengan mengalikan sinyal domain waktu dengan gelombang sinus atau cosinus yang terlihat dan menambahkannya pada hasil akhir. Tabel 8-2 menunjukkan sebuah program komputer untuk menghitung DFT dengan cara ini/
Sifat dasar perkalian dua sinyal disebut orthogonal. Beberapa fungsi basis orthogonal yang terkenal seperti: gelombang square, gelombang triangle, impulse, dll. Program table 8-2 diatas menunjukkan bagaiman sampel individu pada domain frekuensi dipengaruhi oleh semua sampel di domain waktu Program menghitung setiap nilai di domain frekuensi berturut-turut dan bukan secara kumpulan.
DUALITAS
DFT yang kompleks menyebutkan baik waktu dan frekuensi domain sebagai sinyal kompleks N poin masing-masing. Ini membuat kedua wilayah benar-benar simetris, dan persamaan untuk bergerak di antara mereka hampir identik. Kesimetrisan antara domain waktu dan frekuensi disebut dualitas , dan menimbulkan banyak sifat menarik. Sebagai contoh, satu titik dalam domain frekuensi berkorespondensi dengan sinusoid dalam domain waktu. Oleh dualitas, kebalikannya juga benar, satu titik dalam domain waktu sesuai dengan sinusoid pada frekuensi domain.
NOTASI POLAR
Seperti telah dijelaskan sejauh ini, frekuensi domain adalah sekelompok kosinus dan amplitudo dari gelombang sinus (dengan sedikit modifikasi skala). Ini disebut notasi persegi panjang. Atau, frekuensi domain dapat dinyatakan dalam bentuk kutub. Dalam notasi ini, Re X [] & Im X [] adalah digantikan dengan dua array lain, yang disebut Magnitude X [], ditulis dalam persamaan sebagai: Mag X [], dan Fase X [], ditulis sebagai: Tahap X []. Magnituda dan fasa adalah pair-for-pair pengganti yang nyata dan bagian imajiner.
Dalam bentuk persamaan, 2 buah representasi tersebut dinyatakan sebagai :
A cos (x) + B sin(x) = M cos ( x + 2)
Yang penting adalah bahwa tidak ada informasi yang hilang dalam proses ini; jika diberikan satu representasi anda dapat menghitung representasi yang lain. Dengan kata lain, informasi terkandung dalam amplitudo A dan B, juga terdapat dalam variabel M dan θ.
Gambar berikut menunjukkan vektor analog yang merupakan representasi dari bagaimana dua variabel, A dan B, dapat dilihat dalam sistem koordinat persegi panjang, sedangkan M dan θ adalah parameter di kutub koordinat.
GANGGUAN POLAR
Ada banyak sekali gangguan-gangguan yang terkait dengan penggunaan notasi polar, berikut ini tiga diantaranya :
Gangguan 1: Radians vs Degrees
Hal ini dimungkinkan untuk mengungkapkan fase baik dalam derajat atau radian. Ketika dinyatakan dalam derajat, nilai-nilai dalam fase sinyal adalah antara -180 dan 180. Menggunakan radian, masing-masing akan nilai-nilai antara-B dan B, yaitu, antara -3,141592 Ke 3,141592.
Gangguan 2: Bagilah dengan nol kesalahan
Ketika mengkonversi dari notasi rectangular ke polar, sangat umum menemukan frekuensi mana bagian nyata adalah nol dan bagian imajiner adalah beberapa nilai nol. Ini berarti bahwa fase persis 90 atau -90 derajat.
Gangguan 3: Kesalahan arctan
Pertimbangkan sampel domain frekuensi di mana Re X [k] =1 dan Im X [k]= 1. Persamaan 8-6 memberikan yang sesuai nilai-nilai kutub Mag X [k] =1,414 dan Tahap X [k] =45o. Sekarang perhatikan contoh lain di mana Re X [k] =-1 dan Im X [k] = - 1. Sekali lagi, Persamaan. 8-6 memberikan nilai-nilai Mag X [k] =1,414 dan Tahap X [k] =45o. Masalahnya adalah, fase salah! Itu harus - 135o. Ini terjadi setiap kali bagian nyata negatif. Masalah ini dapat dikoreksi oleh pengujian yang nyata dan imajiner bagian setelah fase telah dihitung.




Tidak ada komentar:
Posting Komentar
terima kasi yah
madridista89