CHAPTER 7
Properties of Convolution
Common Impulse Responses
Delta Function
Respon impulse yang paling sederhana adalah tidak lebih dari fungsi delta. Fungsi delta adalah identitas untuk pembelokkan. Pembelokkan sinyal dengan fungsi delta membuat sinyal tidak berubah. Tujuan dari sistem ni adalah sinyal dikirim atau disimpan.
Suatu dorongan pada input menghasilkan dorongan yang sama pada output. Ini berarti bahwa semua sinyal diteruskan melalui sistem tanpa dirubah.
Sifat ini membuat fungsi delta sebagai identitas pembelokkan. Hal ini merupakan anologi dari identitas penjumlahan (a + 0 = a) dan lainnya identitas dari perkalian (a * 1 = a). Jika dilihat sekilas, sistem ini terlihat sederhana. Ternyata tidak, sistem ini ideal untuk penyimpanan data, komunikasi, dan pengukuran.
Jika fungsi delta dibuat lebih besar atau lebih kecil amplitudonya, yang sistem menghasilkan sebuah penguat atau attenuator.
Calculus-like Operations
Konvolusi dapat mengubah sinyal diskrit dengan cara yang mirip integral dan diferensiasi. Karena istilah "turunan" dan "integral" menjelaskan operasi pada sinyal kontinu. Operasi diskrit yang mirip dengan first deriavative disebut turunana pertama. Demikian pula, bentuk diskrit dari integral disebut Running sum.
Low-pass and High-pass Filters
Secara umum, low-pass filter terdiri dari grup dari adjacent positive points. Hal ini mengakibatkan setiap sampel dari sinyal output memiliki perataan dari banyaknya adjacent points dari input sinyal. Perataan ini menghaluskan sinyal, sehingga menghapus komponen berfrekuensi tinggi. Sama seperti di elektronika analog, digital low-pass filter digunakan untuk mengurangi noise, pemisahan sinyal, pembentukkan gelombang, dll
Causal and Noncausal Signals
respon impulse dari sebuah causal system harus memiliki nilai nol untuk semua sampel berjumlah negatif. Untuk menjadi causal, impuls dari sinyal input pada nomor sampel n harus hanya mempengaruhi titik-titik dalam sinyal output dengan jumlah sampel n atau lebih besar. Dalam penggunaan umum, istilah kausal diterapkan pada setiap sinyal di mana semua sampel bernilai negatif memiliki nilai nol, meskipun hal tersebut respons impuls atau tidak.
Zero Phase, Linear Phase, and Nonlinear Phase
Sinyal dikatakan zero phase jika memiliki sampel simetri di kiri-kanan di sekitar angka nol. Sebuah sinyal dikatakan fase linier jika memiliki simetri di kiri-kanan, tapi di sekitar beberapa titik selain nol. Ini berarti bahwa setiap fase linier sinyal dapat diubah menjadi sinyal fase nol hanya dengan pergeseran kiri atau kanan. Terakhir, sinyal dikatakan nonlinier fasa jika tidak tidak memiliki simetri kiri-kanan.
Fase linear dan nonlinear berarti fase, atau bukan, sebuah garis lurus. Pada kenyataannya, sistem harus linear jika dikatakan fase adalah nol, linear, atau nonlinier.
Mathematical Properties
Commutative Property
Jika dua sinyal convolve yang tidak memiliki perbedaan, hasilnya identik.
Dalam setiap sistem linier, input sinyal dan system respon implus yang diharapkan bisa ditukar tanpa mengubah sinyal keluaran. Sinyal input dan respon impulse merupakan hal yang sangat berbeda.
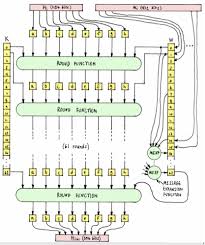
Associative Property
Associative Property menetapkan bahwa urutan dari konvolusi tidak terjadi.
Associative Property digunakan dalam teori sistem untuk menggambarkan keadaan sebuah sistem. Dari Associative Property, urutan sistem dapat disusun kembali tanpa mengubah keseluruhan respon dari cascade. Selanjutnya, sejumlah sistem dapat digantikan dengan sistem tunggal.
Distributive Property
Properti distributif menggambarkan pengoperasian sistem paralel dengan output tambahan. Dua atau lebih sistem dapat berbagi menjadi input yang sama, x [n], dan memiliki output yang telah mengalami penambahan untuk menghasilkan y[n]. Properti distributif memungkinkan kombinasi sistem ini untuk diganti dengan sistem tunggal yang memilki response impulse sama dengan penjumlahan respon impulse dari sistem original.
Transferensi antara Input dan Output
Transferensi antara input dan output merupkan keadaan yang umum terjadi dalam pemrosesan sinyal. Pada figure 7-11, sistem linear menerima sinyal input x[n], dan menghasilkan sinyal keluaran, y[n]. Kemudian sinyal input berubah secara linear, menjadi sinyal inputan baru x’[n]. sinyal inputan ini menghasilkan sinyal keluaran baru y’[n]. Perubahan sinyal input secara linier akan mempengaruhi perubahan sinyal keluaranya secara linier pula. Sebagai contoh, jika sinyal input diperkuat dua kali, output sinyal juga akan diperkuat dua kali.
Teorema Limit Pusat
Teorema Limit Pusat merupakan perangkat yang penting dalam teori probabilitas karena sering dipakai pada distribusi Gaussian setiap kejadian yang terjadi di alam. Sebagai contoh keacakan amplitude pada suhu yang mengikuti distribusi Gaussian. Sirkuit elektronik mengikuti distribusi Gaussian, penampang intensitas sinar laser mengikuti Gaussian juga. Bentuk Teorema Limit Pusat menyatakan bahwa hasil distribusi Gaussian ketika variabel yang diamati merupakan banyaknya proses atau kejadian acak.
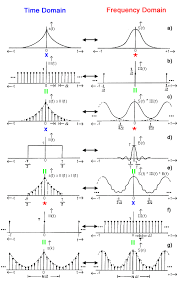
Contoh Teorema Limit Pusat figure 7-12.
(a) nilai tidak teratur, buakn, sehingga bukan seperti distribusi Gaussian.
(b) menunjukkan hasil convolving sinyal ini dengan dirinya sendiri sebanyak satu kali.
(c) menunjukkan hasil convolving sinyal ini dengan dirinya sendiri sebanyak tiga kali. Dengan hanya melakukan tiga kali convolutions, gelombang sudah menyerupai distribusi normal atau Gaussian.
Correlation
Contoh konsep dasar korelasi pada sistem radar
Sebuah antena yang dirancang khusus mentransmisikan gelombang radio pada arah tertentu. Sebuah objek (helikopter) memantulkan sebagian kecil dari energi yang dipancarkan kembali ke sebuah penerima gelombang yang terletak di dekat pemancar. Misal, pulsa yang ditransmisikan dalam bentuk gelombang segitiga. Sinyal yang diterima akan terdiri dari dua bagian:
A.shifted dari pulsa yang ditransmisikan
B.random noise, dari interferensi gelombang, suhu, elektrtonic noise, dll.
Korelasi adalah sebuah operasi matematika yang mirip dengan konvolusi. Seperti halnya dengan konvolusi, korelasi menggunakan dua sinyal untuk menghasilkan sinyal ketiga. Sinyal ketiga ini disebut korelasi silang dari dua masukan sinyal. Jika sinyal berkorelasi dengan dirinya sendiri, sinyal yang dihasilkan bukan disebut otokorelasi. Gambar 7-14 adalah ilustrasi korelasi. Sinyal x [n], dan korelasi silangi sinyal, y [n].gelombang t [n] disebut sinyal target. Amplitudo dari masing-masing sampel dalam persilangan korelasi sinyal adalah ukuran banyaknya sinyal yang diterima target.
Speed
Kecepatan eksekusi sebuah prgaram tergantung pada jenis-jenis operasi yang digunakan dalam algoritma pemrogramanya. DSP menggunakan multiply-accumulate atau akumulasi beberapa operasi sekaligus dalam mengeksekusi programnya.
Jika sebuah sinyal yang terdiri dari N buah sampel berconvolve atau bersilangan dengan sinyal dengan M buah sampel, maka N × M akumulasi perkalianya harus sebagai bentuk awal. PC pada tahun 1990-an membutuhkan sekitar satu mikrodetik per multiply-accumulate. Oleh karena itu, convolving sinyal dengan 10.000 sampel dengan sinyal dengan 100 sampel membutuhkan sekitar satu detik. Setiap kenaikan jumlah sample pada sinyal akan mempengaruhi waktu untuk eksekusi programnya.
Cara mengatasi kecepatan pada eksekusi program :
A)menggunakan sinyal yang singkat dengan data bilangan bulat, bukan floating point.
B)menggunakan komputer yang dirancang untuk DSP. DSP mikroprosesor dengan kecepatan multiply-accumulatenya hanya beberapa puluh nanodetik.
C)menggunakan algoritma yang lebih baik untuk convolution. Sebagai contoh FFT convolution, waktu eksekusi program dikurangi secara terus-menerus. Kelemahannya adalah kompleksitas program yang tinggi.